In der Antriebstechnik werden Asynchronmotoren wegen ihres wartungsarmen und robusten Betriebsverhaltens als drehzahlgesteuerte oder drehzahlgeregelte Antriebe eingesetzt. Die Drehzahl wird über die Frequenz f der Betriebsspannung gesteuert. Sie ist proportional zur Frequenz.
| Ständer | Läufer |
|---|---|
|
|
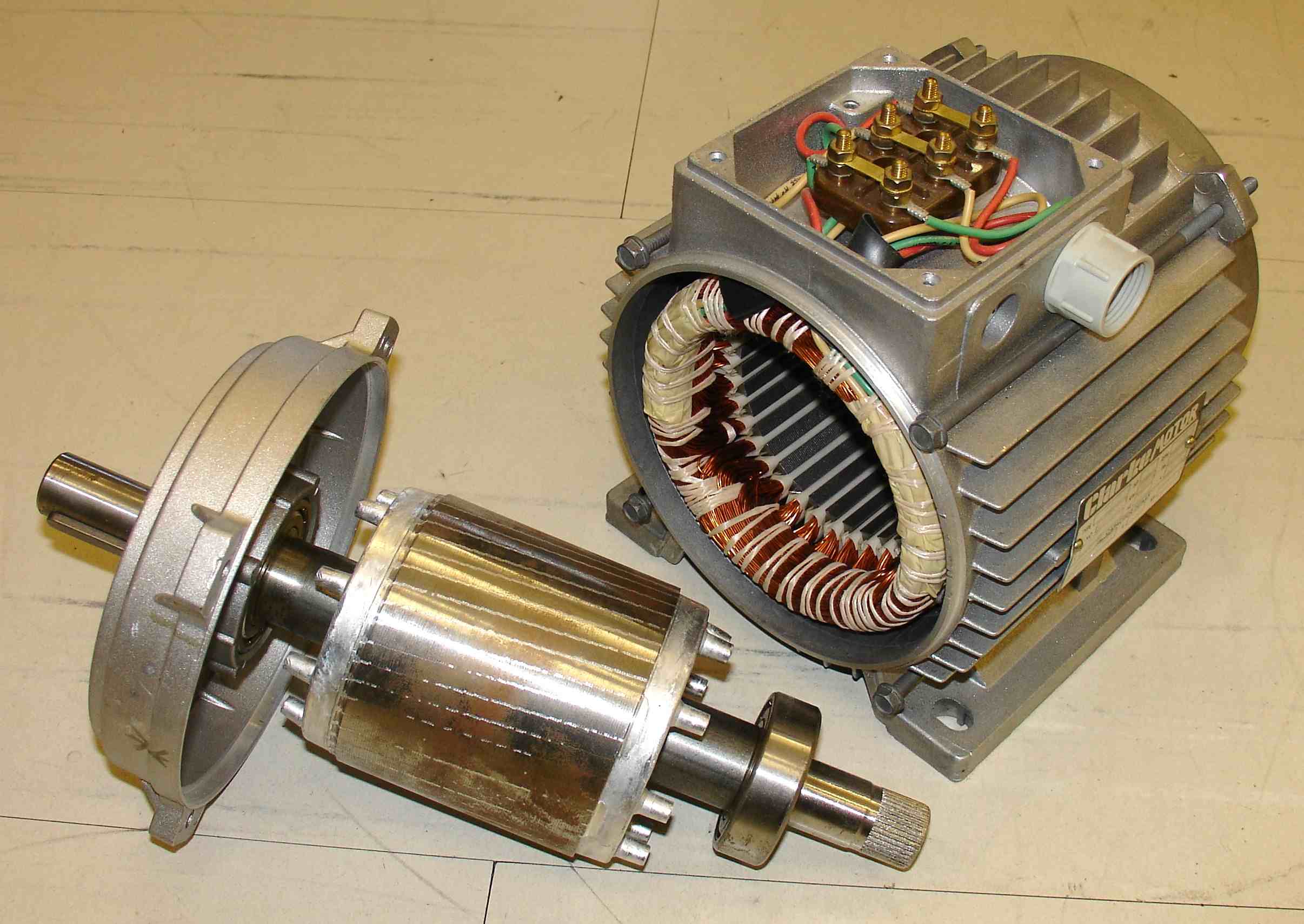
| Der Asynchronmotor besteht aus dem Ständer (feststehender Teil des Motors) und einem drehbar gelagerten Läufer. Im Ständer befinden sich drei um 120° versetzte Drehstromwicklungen. Der Läufer besteht aus mehreren zylinderförmig angeordneten Leiterstäben, die an ihren beiden Stirnseiten kurzgeschlossen sind. | |
Quelle: Dr. M. Filtz, TU Berlin
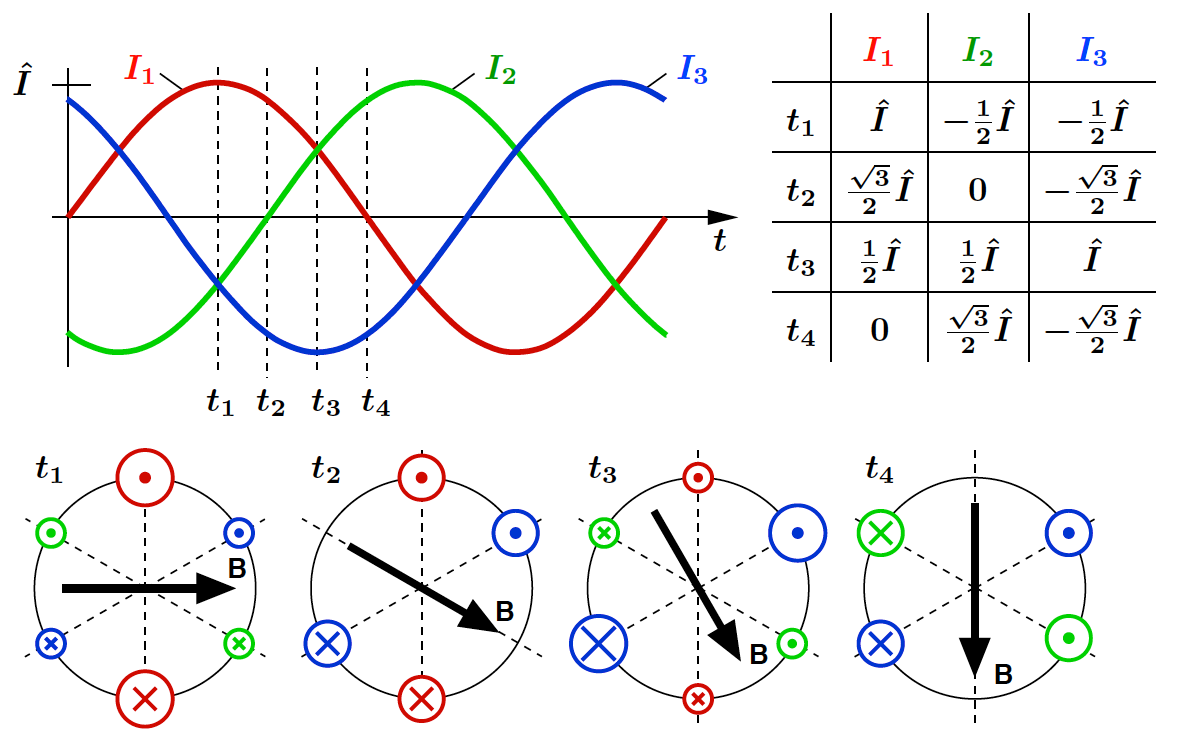
In den Ständerwicklungen entsteht durch die Umpolung der Magnetfelder ein Drehfeld.

Quelle: Wikipedia
Das Drehfeld des Ständers induziert in Stäben des Läufers nur eine Spannung, wenn die Läuferdrehzahl kleiner ist als die Drehfelddrehzahl.
Die in den Läuferstäben induzierte Spannung bewirkt einen Stromfluss in den Läuferstäben.
Das durch den Läuferstrom verursachte magnetisches Feld des Läufers ist dem Magnetfeld der Ständerwicklungen entgegengesetzt. Dadurch kommt eine Drehbewegung zustande.
ωd = 2π⋅nd = α/t = (2π/p)/T = (2π/p)⋅f mit p = 1, 2, 3, 4 .... (Polpaarzahl)
nd = f/p
Je größer die Polpaarzahl, desto kleiner ist die Drehfelddehzahl.
Im 50 Hz Wechselstromnetz kann das Drehfeld nur folgende Werte annehmen:
3000 min-1, 1500 min-1, 1000 min-1, 750 min-1 usw.
ns = nd - n
Die Schlupfdrehzahl ist die Differenz zwischen Drehfelddrehzahl und Läuferdrehzahl.
s = ns/nd
oder:
s = (nd - n)/nd = 1 - n/nd
Der Schlupf s ist das Verhlätnis aus Schlupfdrehzahl und Drehfeldrehzahl. Der Schlupf nimmt Werte zwischen 0 (Stillstand) und 1 (Leerlauf) ein.
Je kleiner der Schlupf ist, desto größer ist die Drehzahl.
Der Schlupf s ist eine wichtige Rechengröße. Mit Hilfe des Schlupfes können Betriebseigenschaften des Asynchronmotors beschrieben und berechnet werden.
Für den Wirkungsgrad η gilt näherungsweise:
η = 1 - s
Die Frequenz f2 des Läuferstromes ist immer kleiner als die
Netzfrequenz f1:
f2 = s⋅f1
In den Ständerwicklungen wird ein magnetisches Feld mit der
Feldstärke B erzeugt. In den Läuferstäben wird nach dem
Induktionsgesetz ein Strom mit der Stromstärke I induziert
(erzeugt).
Die in den Läuferstäben erzeugte Kraft ist proportional zu der
Läuferstromstärke, der Stärke des Ständermagnetfeldes, zu der Länge l
und der Anzahl z der Läuferstäbe.
Fmagn = B⋅I⋅l⋅z
Multipliziert man die magnetische Kraft, die am Umfang des Läufers erzeugt wird, mit dem Radius r des Läufers, so erhält man das Drehmoment eines Asynchronmotors:
M = B⋅I⋅l⋅z⋅r
Anhand des Ersatzschaltbilds kann das Betriebsverhalten des Asynchronmotors beschrieben werden.
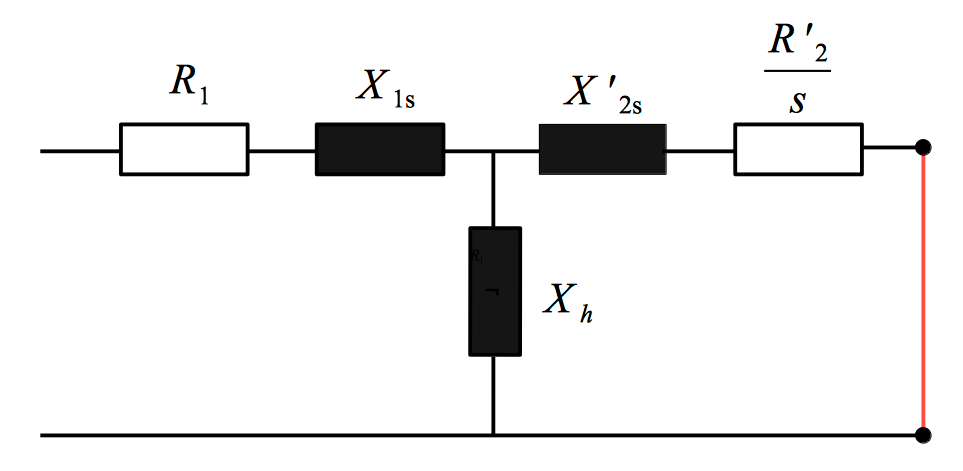
R1: ohmsche Widerstand der Ständerwicklung (Wärmeverlust
R⋅I2)
X1s: primäre Streureaktanz (Streuverluste des Ständers)
Xh: Hauptreaktanz (erzeugt das Erregerfeld B)
X'2s: sekundäre Streureaktanz (Streuverluste des Läufers)
R'2: ohmsche Widerstand der Läuferwicklung (Wärmeverlust R⋅I2)
s: Schlupf
Das Ersatzschaltbild eines Asynchronmotors gleicht dem eines kurzgeschlossenen Transformators.
Das Betriebsverhalten wird durch folgende Formeln beschrieben.
| Größe | Formel | Erläuterung |
|---|---|---|
| Drehfelddrehzahl | nd = f/p |
Die Drehfelddrehzahl ist von der Frequenz f der Motorspannung und von der Polpaarzahl p abhängig. |
| Läuferdrehzahl | n = f(1-s)/p | Die Läuferdrehzahl ist eine Funktion der Frequenz f der Motorspannung, der Polpaarzahl und des Schlupfes. |
| Schlupf | s = (nd - n)/nd | Der Schlupf ist immer kleiner 1 |
| Drehmoment | M = 2⋅Mk/(sk/s + s/sk) | Das Drehmoment ist eine Funktion des Schlupfes (Kloßsche Gleichung). |
| Leistungsaufnahme | Pel =√3⋅U⋅I⋅cosφ | Die aufgenommene elektrische Leistung ist vom Leistungsfaktor und vom Motorstrom abhängig. |
| Drehmoment | M = Pmech/(2πn) | Die abgegebene Drehmoment ist proportional zur Leistung und umgekehrt proportional zur Drehzahl. |
| Leistungsabgabe | Pmech=M⋅2⋅π⋅nd(1-s) | Die mechanische Leistung ist vom Schlupf abhängig. |
Die Drehzahl n (=unabhängige Variable) wird langsam erhöht. Für jede Drehzahl wird das zugehörige Drehmoment M (=abhängige Variable) ermittelt.
Mit der Kloßschen Gleichung
M = 2⋅Mk/(sk/s + s/sk) mit
n = nd(1 - s)
kann die Hochlaufkennlinie dargestellt werden.
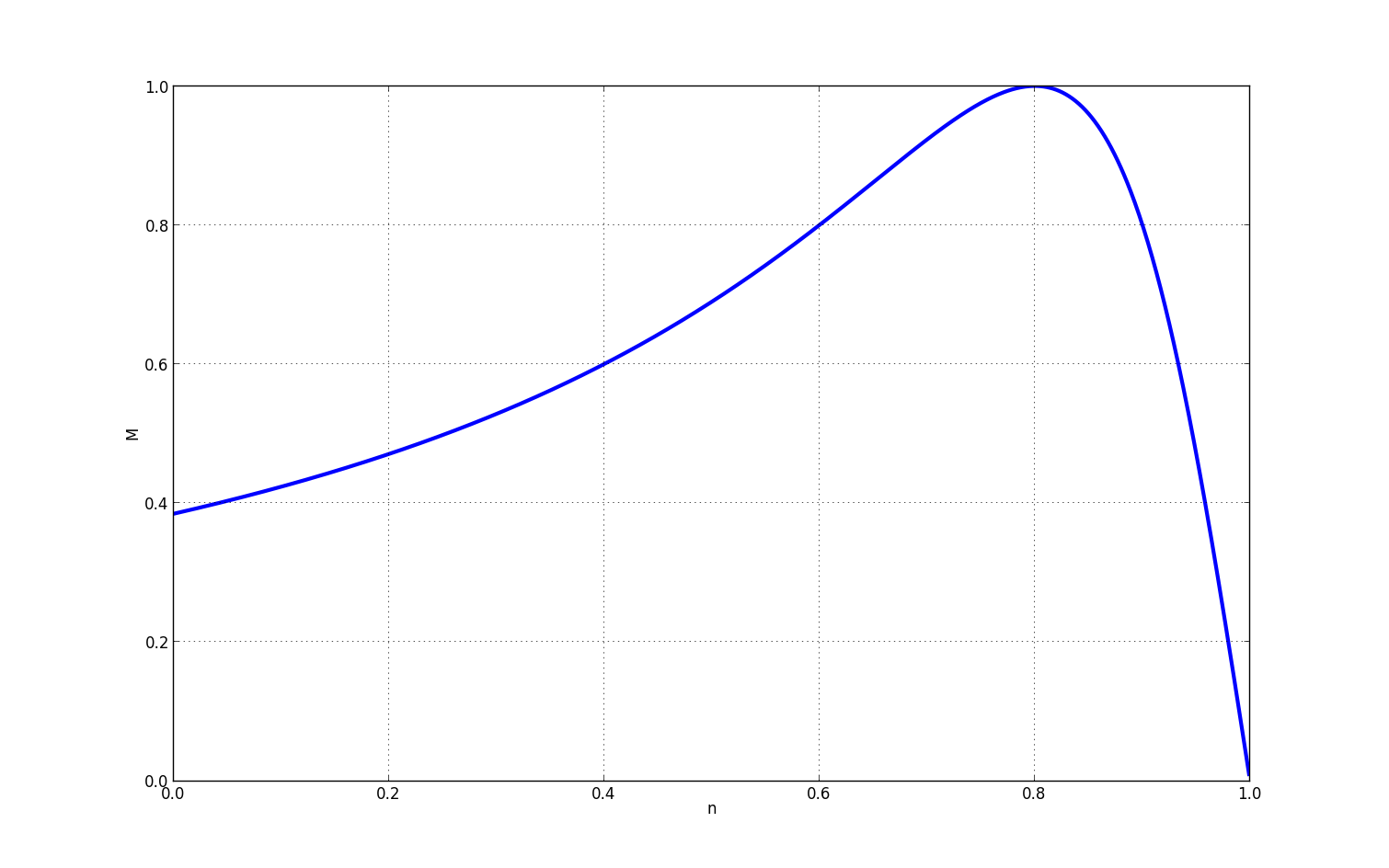
Folgende Betriebspunkte sind von praktischer Bedeutung:
MA: Anlaufmoment
MK: Kippmoment
MN: Bemessungsmoment (Nennmoment)
Der Drehmomentenverlauf ist eine Funktion der Drehzahl: M = f(n).
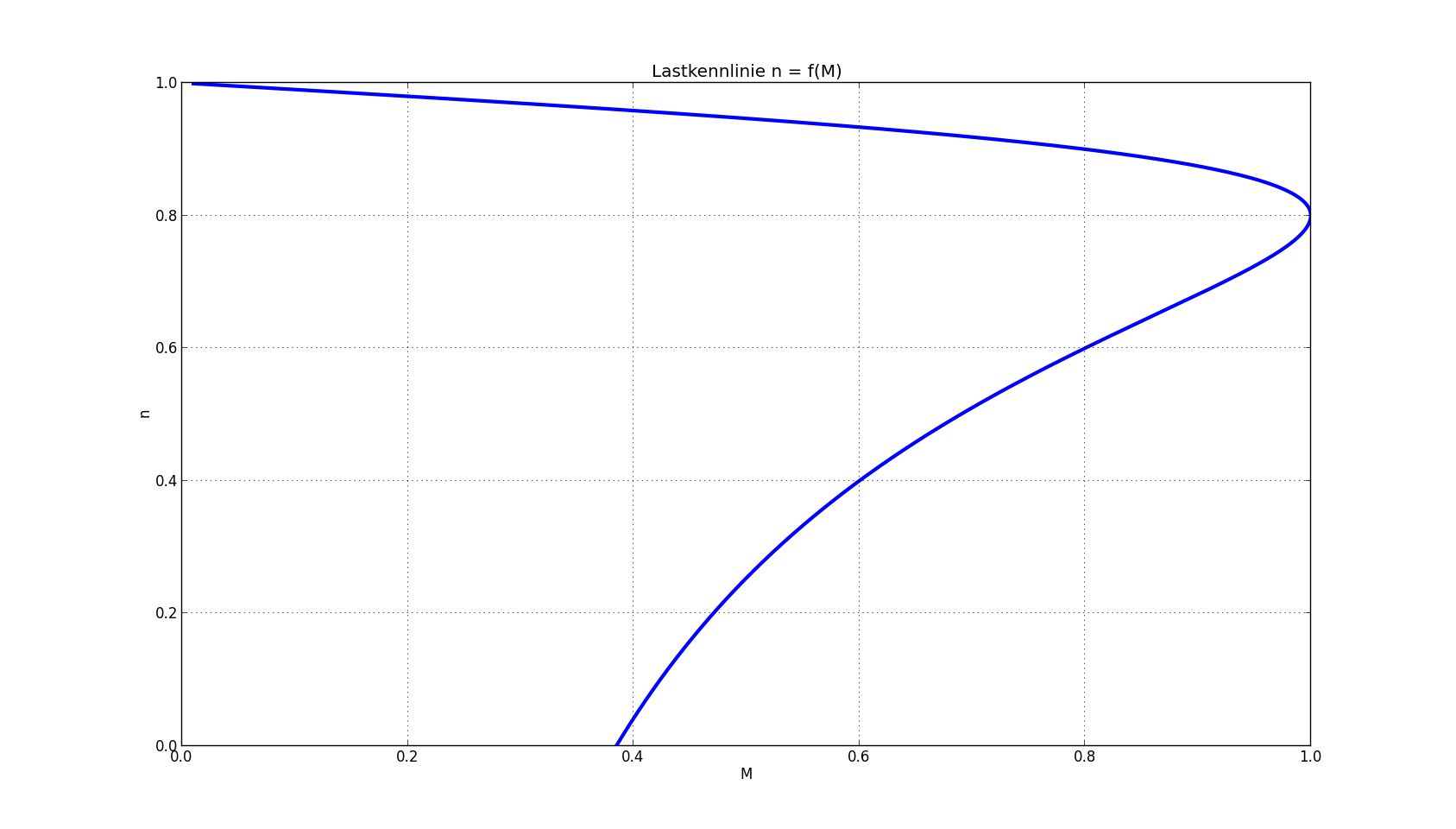
Mit zunehmendem Lastmoment sinkt die Drehzahl. Die Lastkennlinie hat eine negative Steigung.
| Bemmessungsleistung Pmech/kW | 4 | 7,5 | 15 | 110 |
| Bemessungsstromstärke IN/A | 9 | 16 | 31 | 200 |
| Bemessungsdrehzahl nN | 1450 | 1455 | 1496 | 1488 |
| Trägheitsmoment des Läufers JM/kgm2 | 0,0375 | 0,06 | 0,155 | 3,48 |
| Bemessungsdrehmoment MN/Nm | 26,3 | 49,2 | 97,5 | 704,1 |
| ohmscher Widerstand des Ständers R1/Ω | 1,37 | 0,63 | 0,254 | 0,0144 |
| ohmscher Widerstand des Läufers R2/Ω | 1,11 | 0,465 | 0,166 | 0,009 |
| Ständerstreuinduktivität L1/mH | 5,76 | 3,04 | 1,5 | 0,177 |
| Läuferstreuinduktivität L2/mH | 8,82 | 4,63 | 1,55 | 0,216 |
| Hauptinduktivität Lh/mH | 155,3 | 85,2 | 42 | 10,1 |
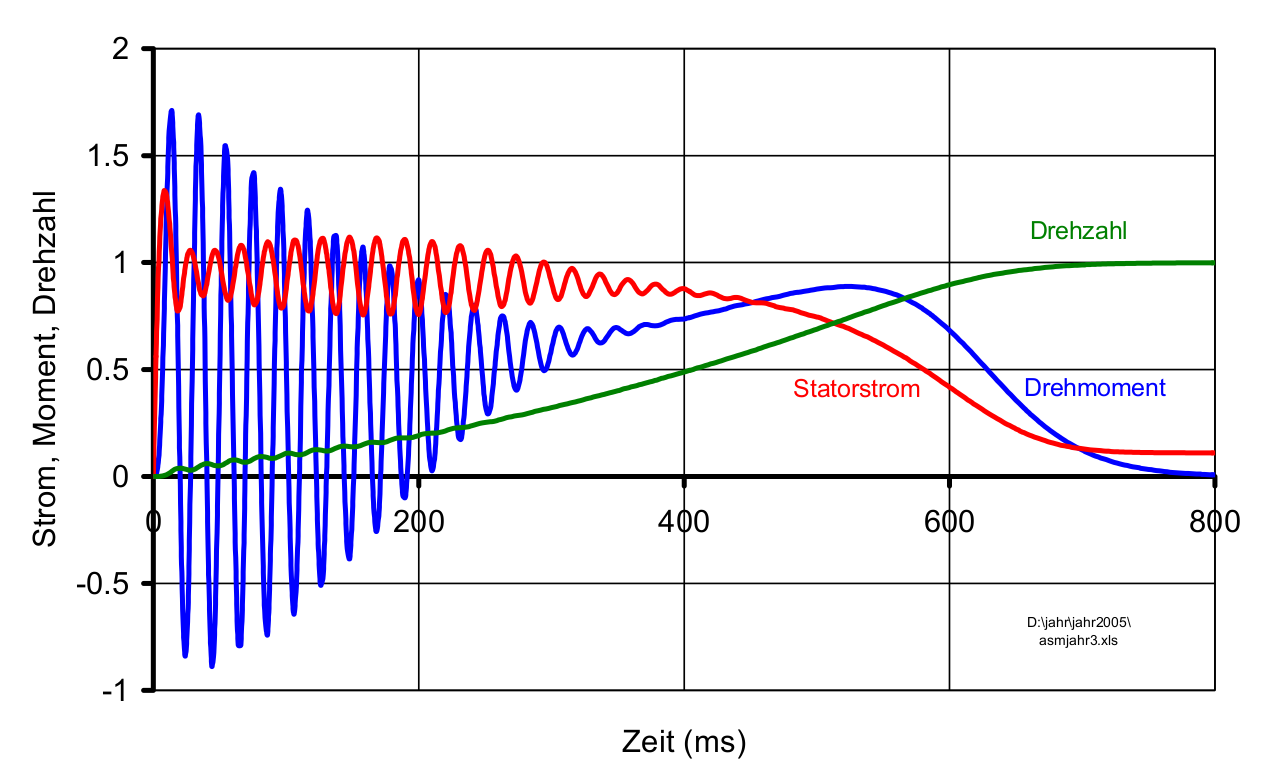
Das Programm simuliert den Hochlaufvorgang eines Asynchronmotors. Verschiedene Parameter (Polpaarzahl, Frequenz, Kippschlupf) können ausprobiert werden.
Bis der Motor die Bemessungsdrehfrequenz erreicht, muss er zusätzlich
zum Lastmoment ML noch das Beschleunigungsmoment MB
aufbringen:
Mges = MB + ML = J⋅Δω/Δt + F⋅r
Das Beschleunigungsmoment kann aus dem Diagramm direkt als Differenz
zwischen dem momentanen Drehmoment M = f(n) und dem Lastmoment
abgelesen werden. Im Kipppunkt ist das Beschleunigungsmoment am
größten. Im Arbeitspunkt (Schnittpunkt der Lastkennlinie mit der
Motorkennlinie) ist das Beschleunigungsmoment null.
Der Motorstrom sinkt mit steigender Drehzahl: I = f(n).
Der Motor wird ohne Verzögerung an die Netzspannung geschaltet. Gemessen wird das Drehmoment M=f(t) und die Drehzahl n=f(t).
Die Antriebswelle des Motors dreht sich mit einer Drehfrequenz von 1430 1/min. Bei dieser Drehfrequenz gibt der Motor eine mechanische Leistung von 15 kW ab. Der Strom in der Zuleitung darf 28 A nicht überschreiten. Die Phasenverschiebung zwischen Spannung und Stromstärke beträgt 25,8°.
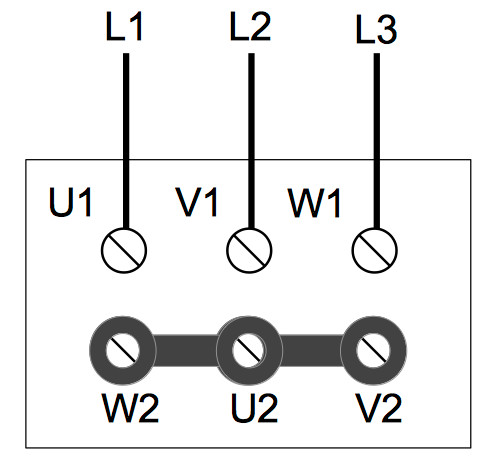
Im Klemmbrett des Motors werden die Brücken verschraubt.
| Sternschaltung | Dreieckschaltung |
|---|---|
 |
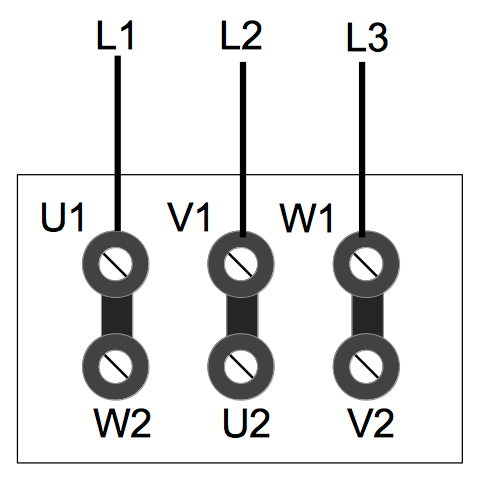 |
In der Dreieckschaltung ist die mechanische Leistung um den Faktor 3 größer als in der Sternschaltung.
| Bau- größe |
P/kW | n min-1 |
IN | MN in Nm |
Wirkungs- grad |
Leistungs- faktor |
IA/IN | MA/MN | Mk/MN | m in kg |
|---|---|---|---|---|---|---|---|---|---|---|
| 71 | 0,25 | 1325 | 0,79 | 1,8 | 0,62 | 0,78 | 3,2 | 1,7 | 1,7 | 4,8 |
| 80 | 0,55 | 1400 | 1,47 | 3,7 | 0,71 | 0,80 | 4,7 | 2,3 | 2,4 | 8,0 |
| 90S | 1,1 | 1410 | 2,8 | 7,5 | 0,75 | 0,81 | 5,0 | 2,1 | 2,5 | 12,3 |
| 100L | 2,2 | 1415 | 4,9 |
15 | 0,79 | 0,82 | 6 | 2,2 | 2,6 | 22 |
| 132M |
7,5 |
1450 | 14,8 |
49 |
0,86 |
0,85 |
7,6 |
2,4 |
3,3 |
53 |
Ein Asynchronmotor soll einen Fahrstuhl (m = 1000 kg) mit einer Geschwindigkeit von v=1 m/s befördern. Die Seiltrommel hat einen Durchmesser von 10 cm.
a) Berechnen Sie die mechanische Leistung.
b) Wählen Sie einen geeigneten Motor aus.
c) Berechnen Sie das Übersetzungsverhältnis des Getriebes.
d) Überprüfen Sie durch Rechnung, ob das Drehmoment des Motors
ausreicht.