Drehzahlsteuerung von Asynchronmotoren mit Frequenzumrichtern
Handlungssituation
Für die beiden Förderbänder und den Hubantrieb müssen passende
Frequenzumrichter ausgewählt werden. Anschließend müssen die
Frequenzumrichter angeschlossen und parametriert werden.
Frequenzumrichter haben die Aufgabe, aus der 50 Hz-Netzspannung
eine Wechselspannung mit variabler Frequenz und variablen Effektivwert
zu erzeugen. Die Drehzahl eines Asynchronmotors steigt proportional zur
Frequenz der Ständerspannung:
n(f) = f(1 - s)/p

In das Bedienfeld des Frequenzumrichtes werden die Parameter (z. B.
Motordaten, Hochlaufzeit und Bremszeit) eingegeben.
Wirkschaltplan eines Frequenzumrichters
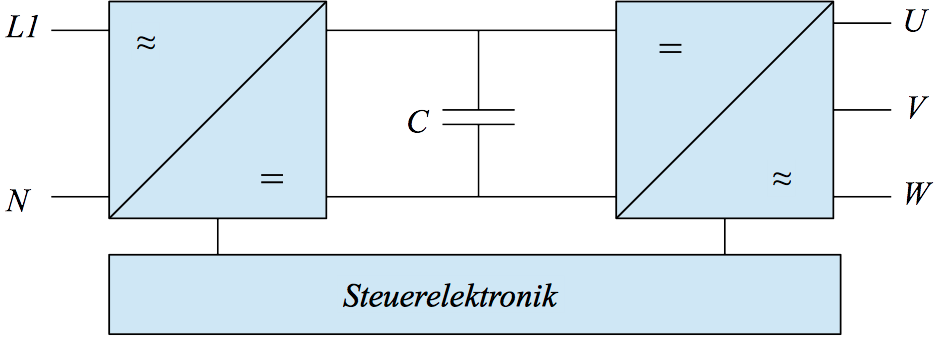
Ein Frequenzumrichter besteht aus einem Gleichrichter, einem
Zwischenkreis und einem Wechselrichter.
Aufgaben
- Zeichnen Sie den Wirkschaltplan eines Frequenzumrichters.
- Beschreiben Sie den Aufbau eines Frequenzumrichters.
- Welche Aufgabe hat der Gleichrichter, der Zwischenkreis, der
Wechselrichter und die Steuerelektronik?
- An den Eingang des Frequenzumrichters wird nur ein Aussenleiter
und der
Neutralleiter angeschlossen. Der Ausgang hat aber drei
Anschlüsse. Geben Sie eine Begründung.
Gleichrichter
Der
Gleichrichter wandelt den Netzwechselstrom in einen Gleichstrom um.
Messschaltung für eine B2U-Schaltung ohne Glättungskondensator
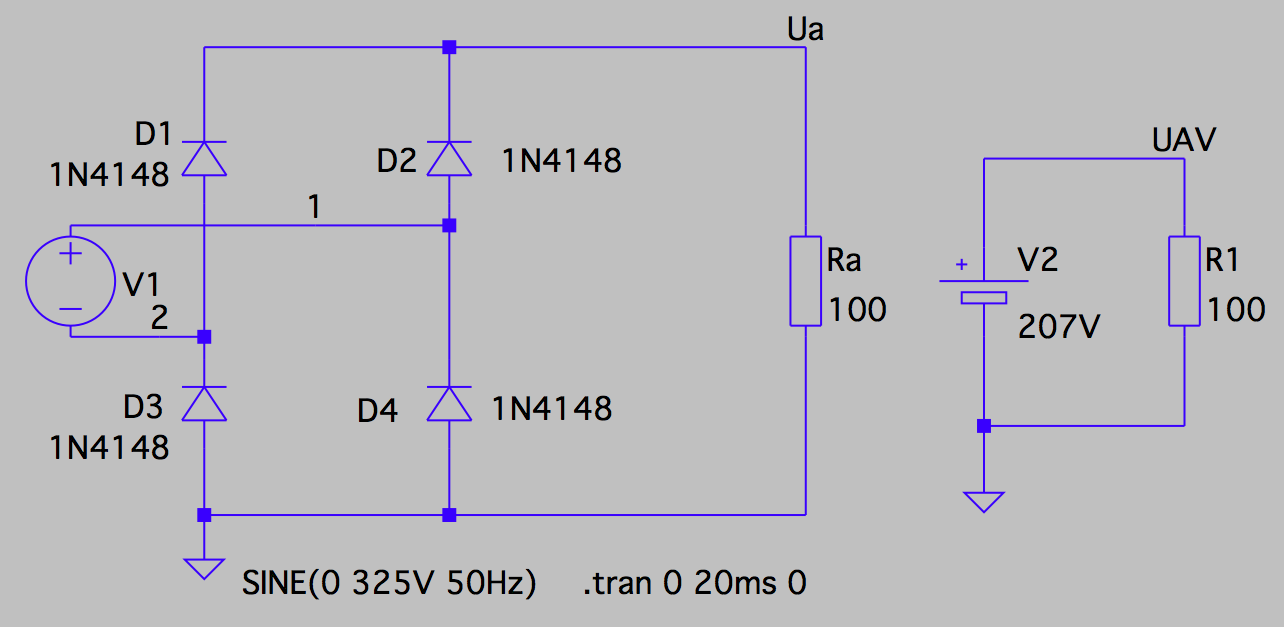
Die sinusförmige Wechselspannung wird durch den Brückengleichrichter in
eine sinusförmige pulsierende Gleichspannung umgewandelt.
Ausgangsspannung der B2U-Schaltung
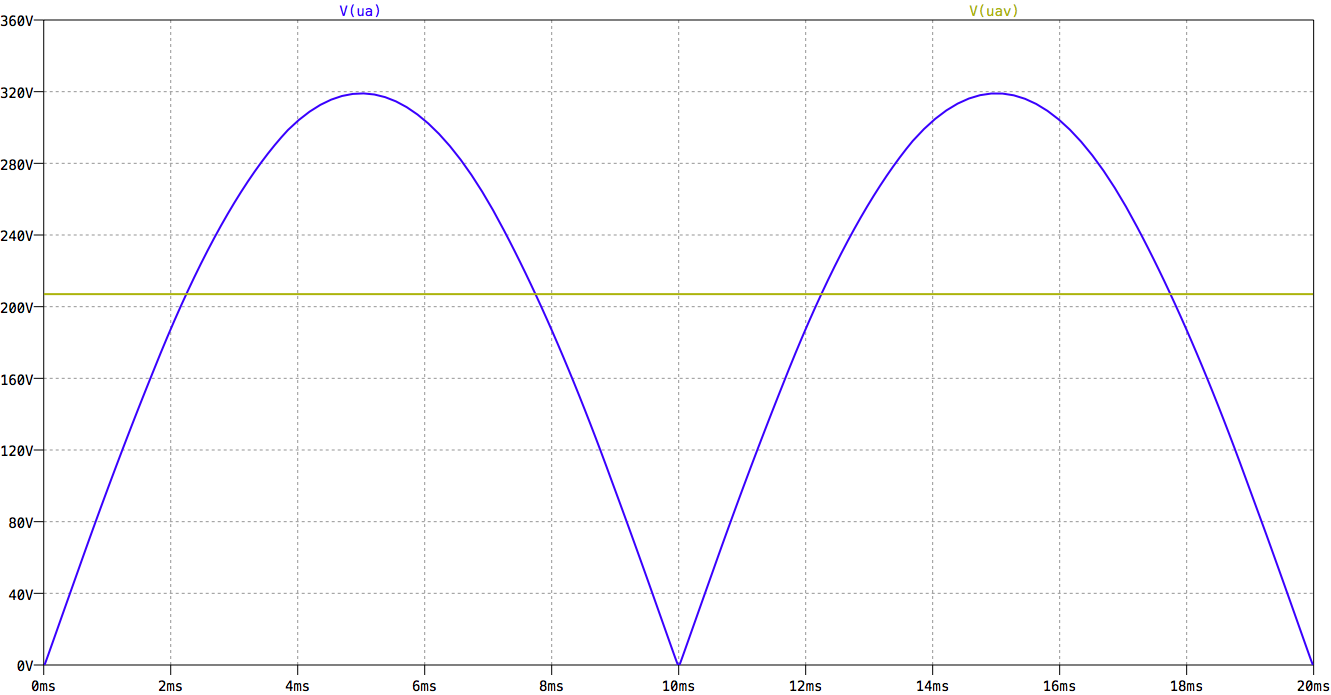
Der
aritmetische Mittelwert der Ausgangsspannung beträgt 64% des
Spitzenwertes.
Aufgaben
- Was bedeutet die Bezeichnung B2U?
- Beschreiben Sie den Aufbau des Brücken-Gleichrichters.
- Beschreiben Sie die Funktionsweise des Gleichrichters.
- Simulieren Sie eine Brückengleichrichterschaltung mit
Glättungskondensator und Lastwiderstand. Verändern Sie den
Lastwiderstand und beobachten Sie Sie den Verlauf der Ausgangsspannung.
- Beschreiben Sie die Form des Eingangsstromes.
- Untersuchen Sie das Betriebsverhalten einer
B6U-Gleichrichterschaltung.
Betriebsverhalten
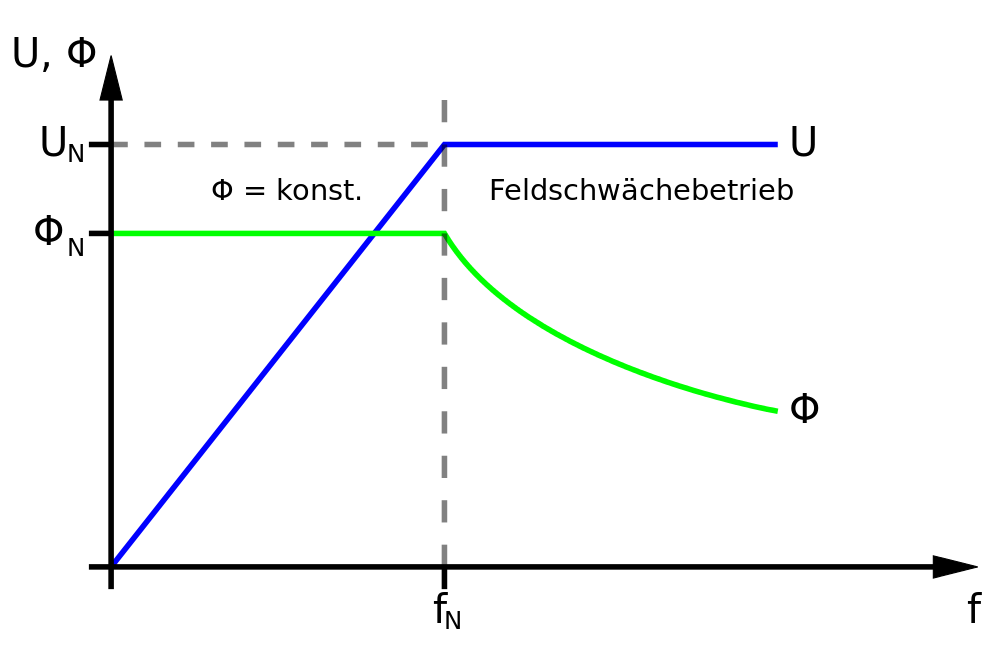
Für die Ständerspannung gilt nach dem ohmschen Gesetz:
U(f) = 2⋅π⋅I⋅L⋅f (zur Erinnerung y = m⋅x, mit
m = 2⋅π⋅I⋅L )
Bei Frequenzen unterhalb der Eckfrequenz muss die Ständerspannung
reduziert werden, damit der Ständerstrom konstant bleibt.
Das Drehmoment M ist proportional zum magnetischen Fluss Φ und damit proportional zur Stromstärke.
Bis zur Eckfrequenz ist das Drehmoment konstant. Oberhalb der
Eckfrequenz verläuft das Drehmoment M umgekehrt proportional zur Stromstärke.
Aufgaben
- Zeichnen Sie die Spannungs-Frequenzkennlinie U = g(f) und
beschreiben Sie den Verlaufder Spannungsfrequenzkennlinie.
- Zeichnen Sie das Ersatzschaltbild einer Ständerwicklung und
begründen Sie den Verlauf der Spannungsfrequenzlinie.
- Eine Ständerwicklung eines Drehstromasynchromnmotors hat eine
Induktivität von 300 mH. Zeichnen Sie die Widerstandskennlinie
einer Ständerwicklung für die Frequenz zwischen 0 bis 50
Hz.
- Der Drehstrommotor mit einer
Wicklungsinduktivität von L = 300 mH wird bei einer
Ständerspannung von 400 V mit einer Frequenz von 25 Hz betrieben.
Wie groß ist die Stromstärke?
- Begründen Sie den Verlauf der Spannungsfrequenzkennlinie.
- Bei einer Ständerspannung von 400 V hat der Asynchronmotor eine
Drehzahl von 1440 U/min. Welche Drehfrequenz hat der Motor bei 25 Hz?
Welche Spannung liegt an der Ständerwicklung an?
- Zeichnen Sie den qualitativen Verlauf des Drehmomentes M = g(f).
Begründen Sie den Verlauf.
- Was versteht man unter Boost?
Wechselrichter

Der Wechselrichter wandelt die Ausgangsspannung des Gleichrichters
in eine rechteckförmige Wechselspannung um.
Durch Veränderung der Einschaltzeit wird der Effektivwert der
Ausgangsspanung reduziert.
Schaltung eines 3-Phasen-Wechselrichters
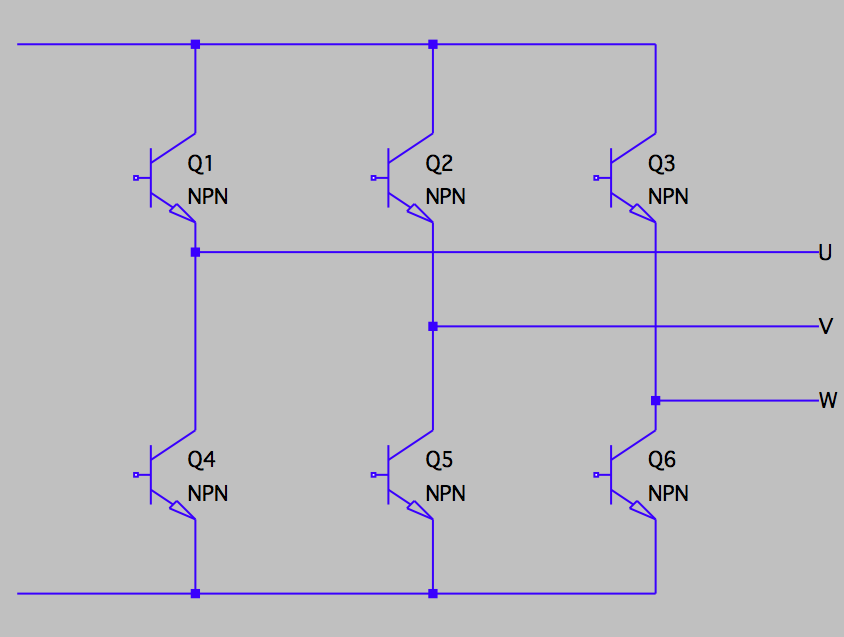
Die sechs Transistoren müssen so angesteuert werden, dass eine
dreiphasige Wechselspannung (Drehstrom) entsteht.
Pulsweitenmodulierte Ausgangsspannung (PWM)
Durch die Pulsweitenmodulation wird die Ausgangsspannung der
Sinusform angeglichen.
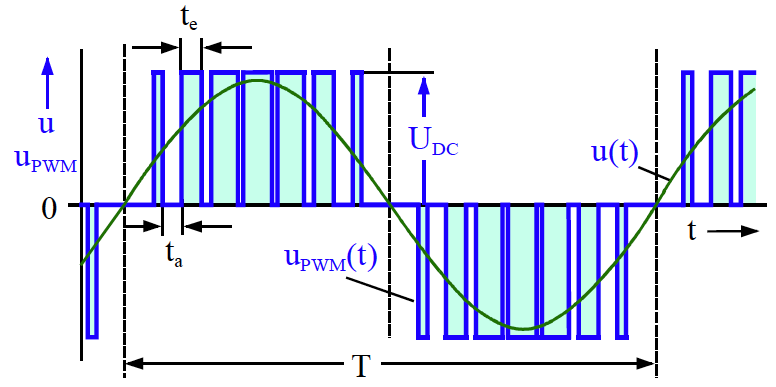
Bei der Pulsweitenmodulation werden die Rechtecke der positiven und
negativen Halbwellen in mehrere Blöcke mit variabler Pulsweite
aufgeteilt. Dadurch soll der arithmetische Mittelwert der Halbwellen einer Sinusform
angeglichen
werden. An der Stelle, wo der Sinus sein Maximum hat, befindet sich die
größte Pulsweite. Links und rechts davon verringern sich die Pulsweiten
entsprechend
der Sinusform.
Aufgaben
- Beschreiben Sie die Funktionsweise eines Schalttransistors.
- Zeichnen Sie die Schaltung eines 1-Phasen-Wechselrichters.
- Beschreiben Sie die Funktionsweise des Wechselrichters.
- Zeichen Sie die Ausgangsspannung eines 1-Phasen-Wechselrichters.
- Wie lässt die Ausgansspannung reduzieren?
- Zeichnen Sie den Schaltplan eines Wechselrichters für Drehstrom.
- Was versteht man unter Pulsweitenmodulation (PWM)?
- Beschreiben Sie die Form einer pulsweitenmodulierten Spannung.
- Begründen Sie die Form einer pulsweitenmodulierten Spannung.
- Welche Probleme ergeben sich durch die Pulsweitenmodulation?
Installation
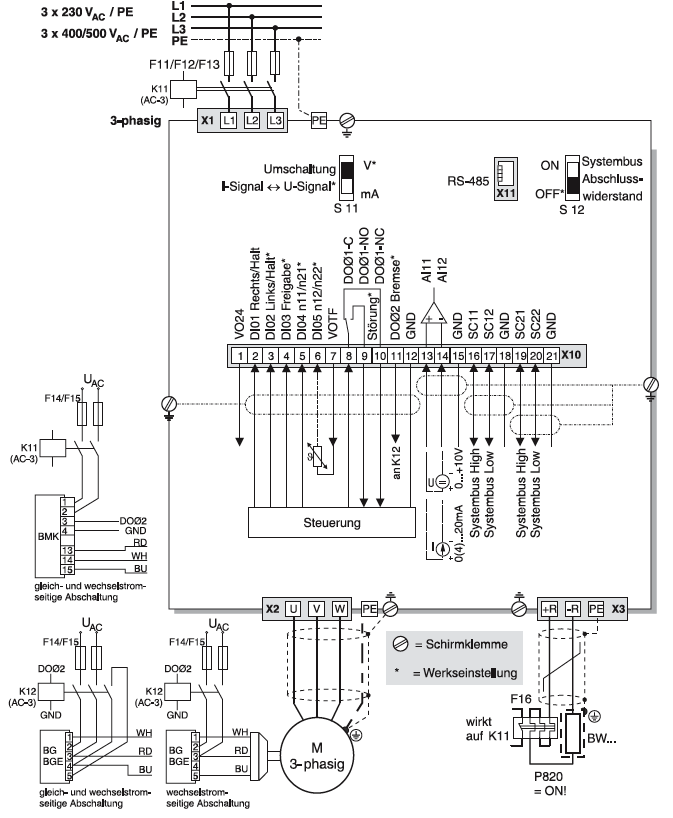
Der Frequenzumrichter wird über ein Schütz eingeschaltet.
Aufgaben
- Beschreiben Sie wie ein Frequenzumrichter angeschlossen wird.
- Welche Aufgabe haben die Sicherungen F11/F12/F13? Begründen Sie
den Installationsort.
- Was ist bei der Installation eines Frequenzumrichters zu beachten?
- Wozu dient die Abschirmung der Motorzuleitung?
Parametrieren des Frequenzumrichters
Folgende Parameter müssen in den Frequenzumrichter eingegeben werden:
- Leistungsfaktor
- Bemessungstrom
- Ständerspannung
- Eckfrequenz
- Leistung
- Hochlaufzeit
- Bremszeit

Wegen der Massenträgheit der Arbeitsmaschine darf die Drehzahl beim
Hochlaufen nur langsam erhöht werden.
Aufgaben
- Beschreiben und begründen Sie den typischen Verlauf einer
Bahnkurve.
- Wie werden Frequenzumrichter parametriert?
- Welche Parameter müssen eingegeben werden?
- Erstellen Sie einen Arbeitsplan für die Inbetriebnahme eines
Frequenzumrichters.
- Ein Förderband soll sich mit einer Geschwindigkeit von 0,1 m/s
bewegen. Der Durchmesser der Antriebsrollen beträgt 10 cm. Ein
Getriebe reduziert die Motordrehzahl um 1/6. Welche Motordrehzahl muss
dem Frequenzumrichter als Drehzahlparameter übergeben werden?
- Wählen Sie geeignete Parameter für die Hochlauf- und Bremszeit.
- Tragen Sie die Parameter für den ausgewählten Motor und
Frequenzumrichter in eine Tabelle ein.