Die Regelungstechnik beschäftigt sich mit der Bereitstellung von speziellen elektronischen Schaltungen, die physikalische Größen unabhängig von äußeren Störeinflüssen dauerhaft auf einem gewünschten Wert halten. Beispiele für solche Regelungen sind:
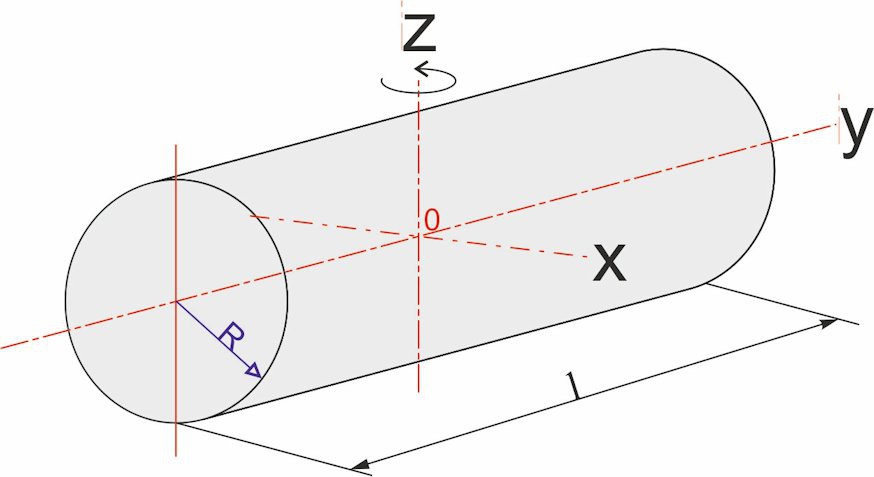
Der Zylinder aus Stahl hat eine Länge von 2 m und einen Durchmesser von 50 cm. Die Drehfrequenz soll auch bei Störungen (z.B. durch Abbremsen oder Spannungsschwankungen der Ankerspannung) auf einem konstanten Wert gehalten werden. Ein geeigneter Regler soll ausgewählt werden. Außerdem sollen die optimalen Reglereinstellungen (Parameter) ermittelt werden. Das Trägheitsverhalten des Vollzylinders wird durch das Trägheitsmoment beschrieben:
J = 0,5⋅m⋅R²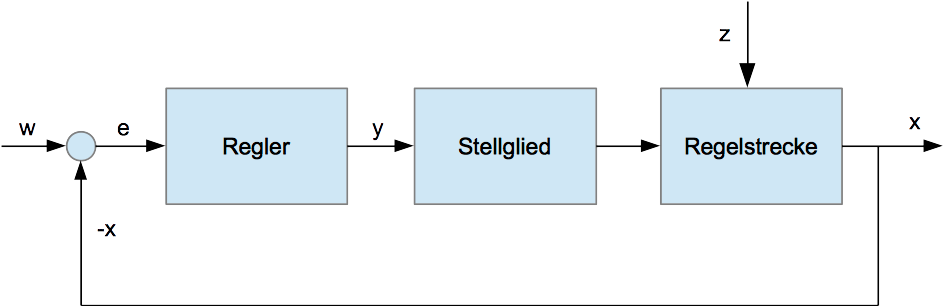
Das Regeln -die Reglung- ist ein Vorgang, bei dem eine Größe, die zu regelnde
Größe, Regelgröße x, fortlaufend erfasst, mit einer anderen Größe, der
Führungsgröße w, verglichen und im Sinne einer Angleichung an die Führungsgröße
beeinflusst wird.
Kennzeichen für das Regeln ist der geschlossene Wirkungsablauf, bei dem die
Regelgröße x im Wirkungsweg des Regelkreises fortlaufend sich selbst
beeinflusst (DIN 19226).
Führungsgröße w Die Führungsgröße ist derjenige vorgegebene Wert, auf dem die Regelgröße durch Regelung gehalten werden soll.
Regelgröße x
Die Regelgröße ist diejenige Größe, die durch das Regeln dauernd gleich der
Führungsgröße gemacht werden soll.
Stellgröße y
Die Stellgröße ist diejenige Größe, durch welche die Regelgröße in erwünschter
Weise beeinflusst werden kann.
Störgröße z
Die Störgröße ist diejenige Größe, deren Änderung die Regelgröße in einer
unerwünschten Weise beeinflusst.
Regelstrecke
Die Regelstrecke ist derjenige Teil des Regelkreises, in dem die Regelgröße
geregelt werden soll.
Regeldifferenz e
Die Regeldifferenz ist die Differenz zwischen Führungsgröße und Regelgröße.
RA: Ankerwiderstand
LA: Ankerinduktivität
J: Trägheitsmoment des Läufers
Die Drehfrequenz eines Gleichstrommotors ist proportional zur Ankerspannung UA.

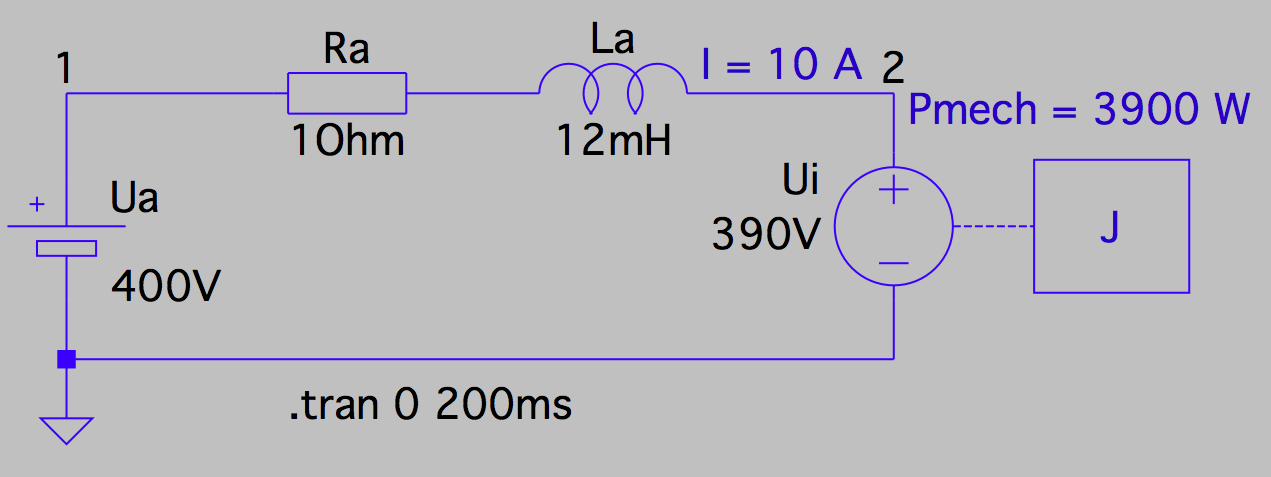
Regelstrecken enthalten Energiespeicher. Die Anzahl der Energiespeicher bestimmt die Ordnung der Regelstrecke. Eine Regelstrecke kann durch eine R-L-C-Reihenschaltung nachgebildet werden. Die Massenträgheit wird durch die Größe der Kapazität bestimmt:
Cdyn = J⋅(IAN/MN)2.Die dynamische Kapazität repräsentiert die Massenträgheit der Arbeitsmaschine. Die Regelstrecke eines fremderregten Gleichstrommotors und der Arbeitsmaschine (Vollzylinder) kann als Reihenschwingkreis bestehend aus dem Ankerwiderstand RA, der Ankerinduktivität LA und der dynamischen Kapazität Cdyn (Trägheitsmoment der Motorwelle und dem Vollzylinder) nachgebildet werden. Die an der Kapazität anliegende Spannung ist proportional zur Drehzahl.
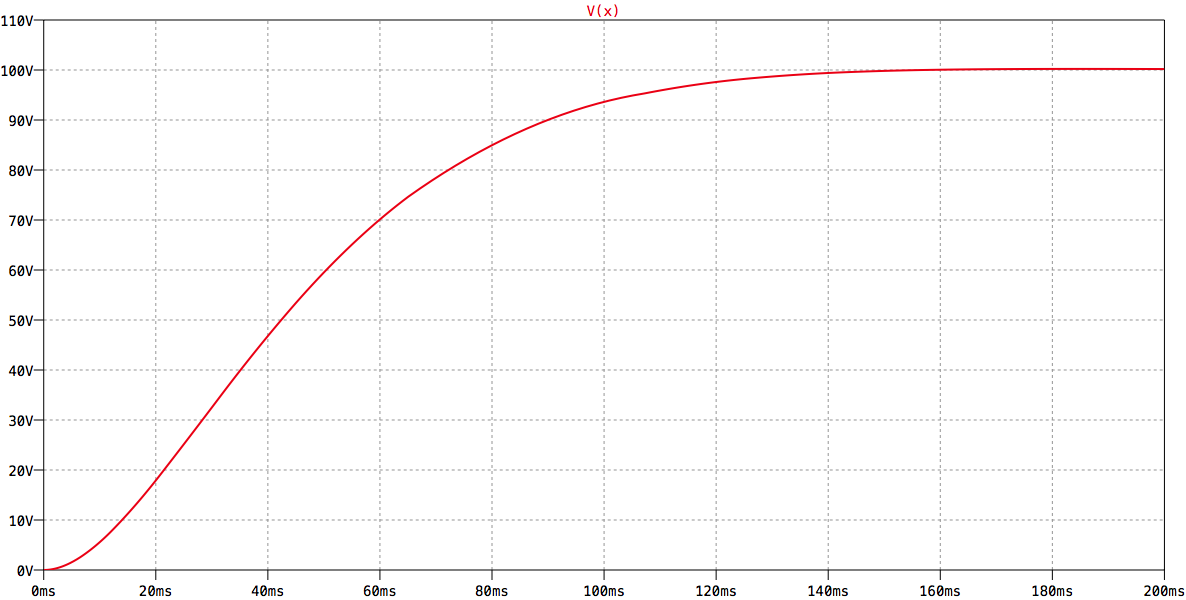
Die Spannung repräsentiert den Drehfrequenzverlauf. Der Spannungswert auf der Ordinate von 100 V entspricht 100%.
Die Spannung wird zum Zeitpunkt t= 0 eingeschaltet. Der Drehzahlverlauf wird
mit einem x-y-Schreiber aufgenommen.
Durch Anlegen der Tangente können die Verzugszeit und die Ausgleichszeit ermittelt werden.
Es gibt Verfahren der Reglereinstellungen, die auf Erfahrung beruhen. Das hier ausgewählte Verfahren von Chien, Hrones und Reswick beruht auf der Ermittlung zweier Zeitkonstanten, der Verzugszeit Tu und der Ausgleichszeit Tg. In der Sprungantwort der Regelstrecke wird durch den Wendepunkt eine Tangente angelegt. Der Abstand zwischen dem Schnittpunkt dieser Tangente mit der Abszisse (waagerechte Achse) und der Ordinate (senkrechte Achse) heißt Verzugszeit Tu. Die Ausgleichszeit Tg ist der Abstand zwischen dem Schnittpunkt der Tangente mit der Leerlaufdrehzahl und der Ordinate minus der Verzugszeit.
Die Regelbarkeit einer Regelstrecke wird durch das Verhältnis von Tu zu Tg bestimmt.
| Tu/Tg < 0,1 | gut regelbar |
| Tu/Tg <= 0,166 | noch regelbar |
| Tu/Tg > 0,3 | schwierig regelbar |
| Tu/Tg = 1 | kaum regelbar |
Die Daten können der Tabelle entnommen werden. Alle Motoren haben ein
Trägheitsmoment von J = 0,22 Nms2.
| UA in V | nN in 1/min | PN in kW | MN in Nm | IAN in A | LA in mH | RA in Ω | Cdyn in F | Tmech | Tel |
|---|---|---|---|---|---|---|---|---|---|
| 260 | 765 | 9,2 | 115 | 42 | 13 | 0,795 | . | . | . |
| 400 | 750 | 13,5 | 172 | 41 | 24 | 1,49 | . | . | . |
| 400 | 1100 | 19,5 | 169 | 57 | 12 | 0,795 | . | . | . |
| 400 | 1340 | 23,5 | 167 | 67 | 8,6 | 0,554 | . | . | . |
| 400 | 1580 | 27,5 | 166 | 78 | 6,3 | 0,409 | . | . | . |
| 400 | 2430 | 40 | 157 | 110 | 2,8 | 0,197 | . | . | . |
Die elektrische und die mechanische Zeitkonstante bestimmen das Anlaufverhalten des Motors.
| Formel | Erläuterung | |
|---|---|---|
| elektrische Zeitkonstante | Tel = LA/RA | Die el. Zeitkonstante ist direkt proportional zur Ankerinduktivität LA und umgekehrt proportional zum Ankerwiderstand RA. |
| dynamische Kapazität | Cdyn = J⋅(IAN/MN)2 | Die dynamische Kapazität ist proportional zum Trägheitsmoment J und proportional zum Quadrat des Quotienten aus Ankernennstrom IAN und Motornennmoment MN. |
| mechanische Zeitkonstante | Tmech = Cdyn⋅R A | Die mech. Zeitkonstante ist proportional zur dyn. Kapazität Cdyn und proportional zum Ankerwiderstand. |
Es gibt drei grundlegende Reglertypen:
Ein P-Regler ist ein einfacher Verstärker, der das Eingangssignal um den Betrag des Verstärkungsfaktors (Proportionalbeiwert) verstärkt.
Der D-Regler ermittelt die Steigung des Eingangssignals. Die Kenngröße dieses Reglers heißt Vorstellzeit Tv.
Der I-Regler ermittelt die Fläche unter der Kurve des Eingangssignals. Die Kenngröße dieses Reglers heißt Nachstellzeit Tn.
| Reglertyp | Vorteil | Nachteil |
|---|---|---|
| P-Regler | schnell | bleibende Regelabweichung |
| D-Regler | schnell | bleibende Regelabweichung |
| I-Regler | keine bleibende Regelabweichung | langsam |
Durch die Kombination aller drei Reglertypen erhält man den PID-Regler. Er vereinigt alle Vorteile der drei Reglertypen und verfügt nicht mehr über deren Nachteile.
An eine Regelung werden vier Anforderungen gestellt:
Reglertypen können nicht beliebig eingesetzt werden. Zu jeder Regelstrecke muss ein passender Reglertyp ausgewählt werden.
| Regelgröße | P-Regler | I-Regler | PI-Regler | PID-Regler |
|---|---|---|---|---|
| Temperatur | bedingt geeignet | ungeeignet | geeignet | geeignet |
| Druck | brauchbar | geeignet | geeignet | geeignet |
| Durchfluss | ungeeignet | geeignet | I-Regler besser | nicht erforderlich |
| Niveau | bedingt geeignet | ungeeignet | geeignet | nicht erforderlich |
| Drehzahl | bedingt geeignet | ungeeignet | geeignet | geeignet |
| Spannung | geeignet | geeignet | geeignet | geeignet |
| Folgeregelung | bedingt geeignet | geeignet | geeignet | geeignet |
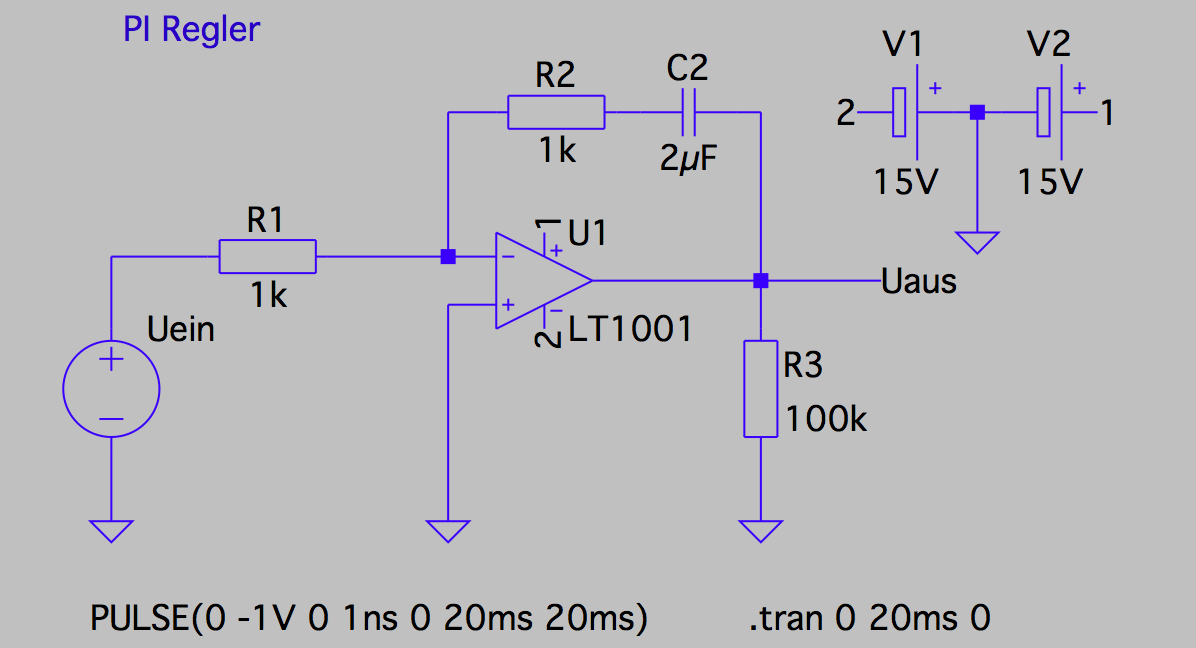
Nachstellzeit: Tn = R2⋅C2 Verstärkung: Kp = R2/R1
| Parameter | Formel |
|---|---|
| Verstärkung | Kp = R2/R1 |
| Nachstellzeit | Tn = R2⋅C2 |
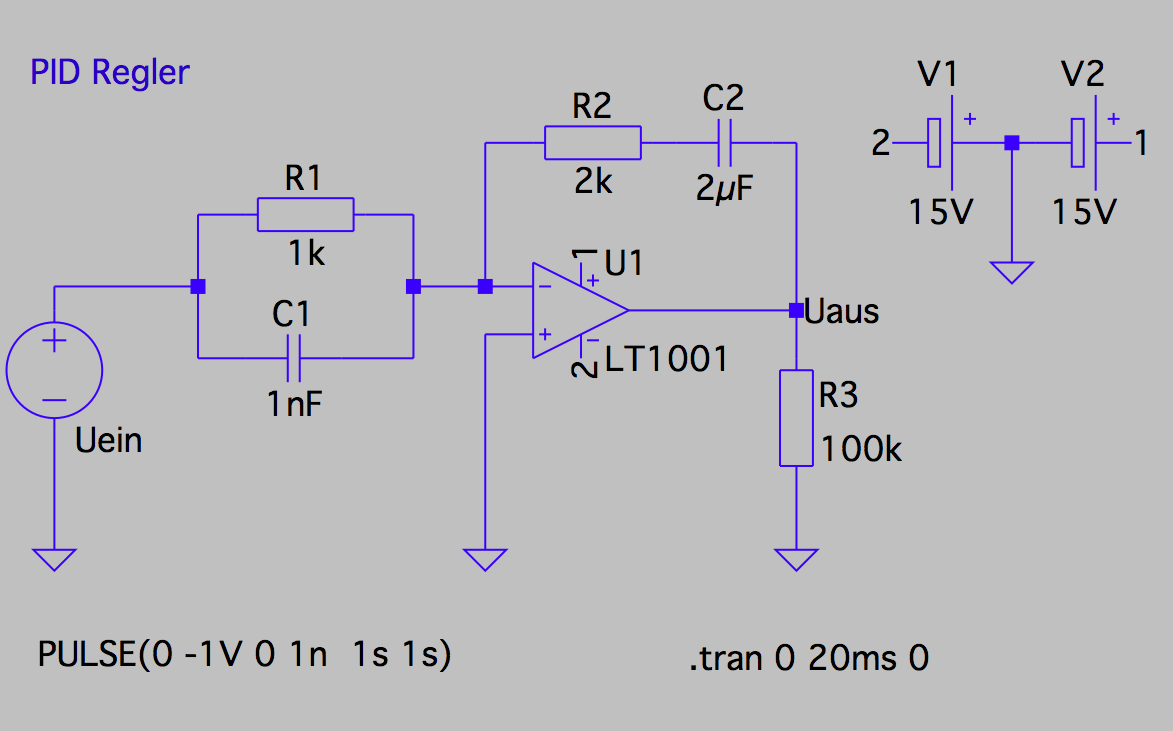
| Vorhaltezeit | Tv = R1⋅C1 |
| Regler | Parameter | aperiodisch | 20% überschwingen | ||
| Störung | Führung | Störung | Führung | ||
| PI | Kp | 0,6Tg/Tu | 0,35Tg/Tu | 0,7Tg/Tu | 0,6Tg/Tu |
| Tn | 4Tu | 1,2Tg | 2,3Tu | 1,0Tg | |
| PID | Kp | 0,95Tg/Tu | 0,6Tg/Tu | 0,95Tg/Tu | |
| Tn | 2,4Tu | 1,0Tg | 2,0Tu | 1,35Tg | |
| Tv | 0,5Tu | 0,42Tu | 0,47Tu | ||
Das Programm simuliert die Drehzahlregelung eines fremderregten Gleichstrommotors. Durch Variation der Reglerverstärkung Kp, der Nachstellzeit Tn und der Vorhaltezeit Tv des PID-Reglers kann die optimale Reglereinstellung ermittelt werden.