Servoantriebe sind Antriebssysteme, die ein dynamisches, genaues und
überlastfähiges Verhalten in einem großen Drehzahlstellbereich
aufweisen. Das
Wort “servo” ist vom lateinischen “servus” abgleitet, was mit Diener,
Sklave
oder Helfer übersetzt wird.
Anforderungen an einen Servomotor:
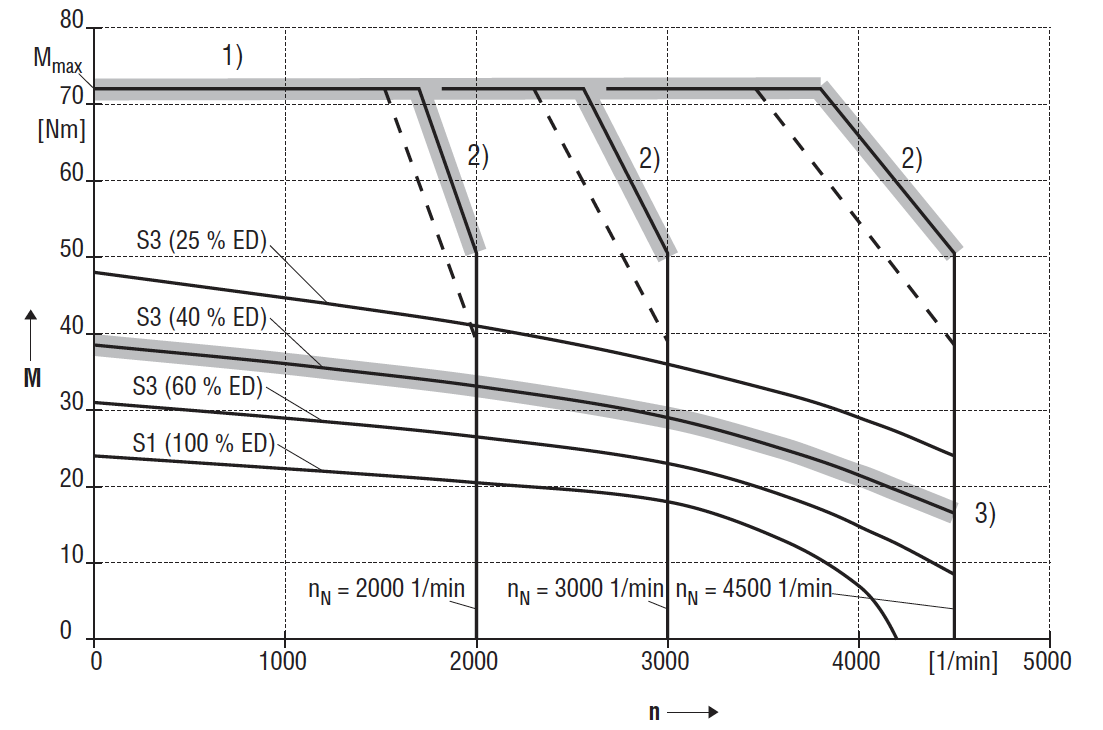
Bei der Drehzahl-Drehmoment-Kennlinie eines Servomotors werden drei Grenzen sichtbar, die bei der Projektierung eines Antriebes berücksichtigt werden müssen.

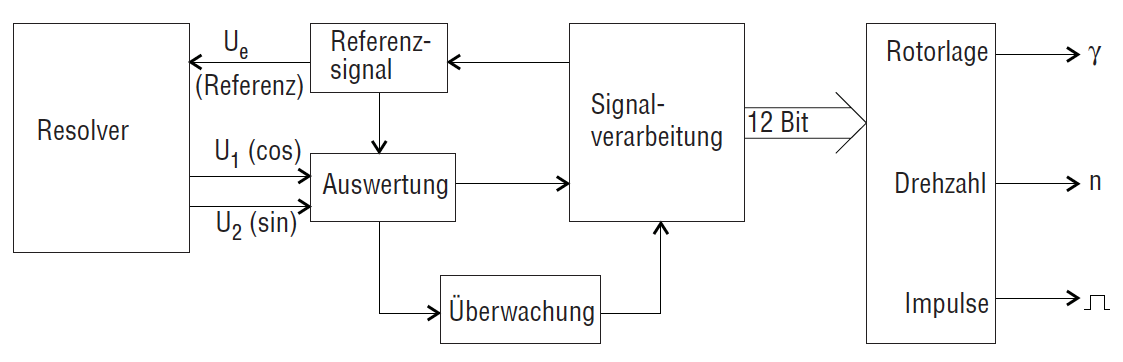
Der Resolver arbeitet nach dem Prinzip eines Drehtransformators. Beim Drehtransformator besteht der Rotor aus einer Spule (Wicklung), die mit der Statorwicklung einen Transformator bildet. Der Resolver ist prinzipiell genauso aufgebaut, mit dem Unterschied, daß der Stator nicht aus einer, sondern aus zwei um 90° zueinander versetzten Wicklungen aufgebaut ist. Der Resolver dient zur Ermittlung der absoluten Lage der Motorwelle innerhalb einer Umdrehung. Außerdem wird aus dem Resolversignal die Drehzahl und eine Encoder-Nachbildung für die Lageregelung abgeleitet.
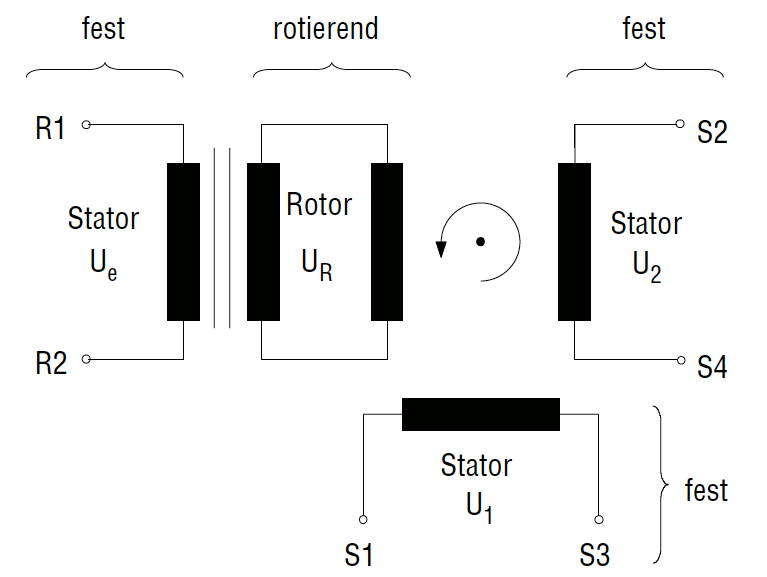
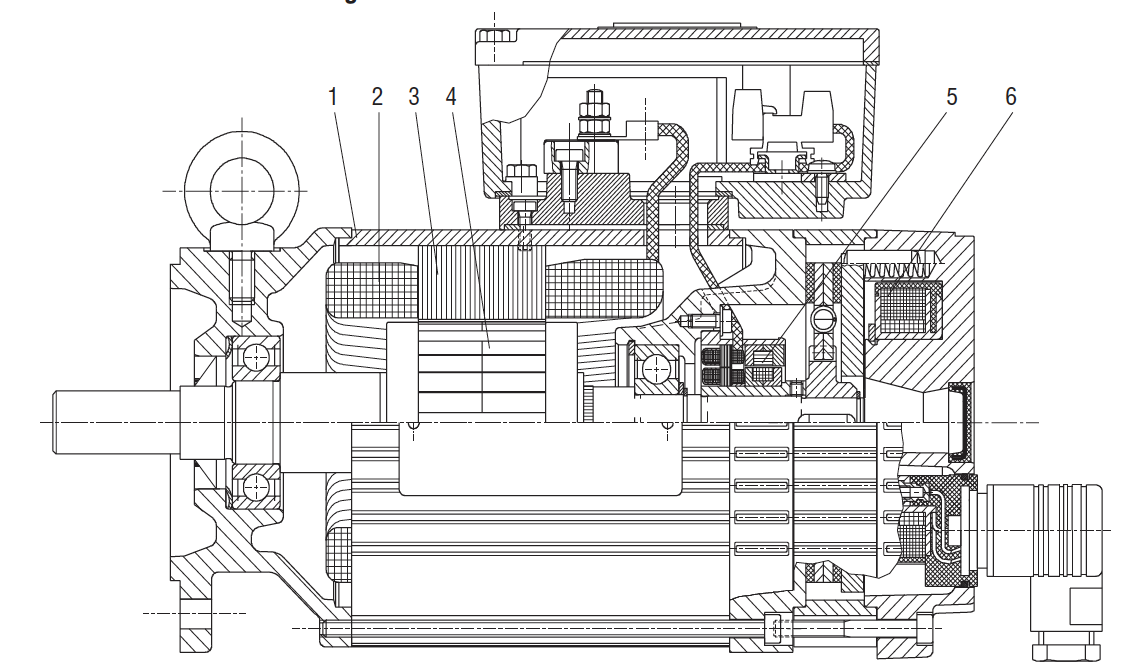
Der Rotor des Resolvers ist auf der Welle des Motors befestigt. Um die Primärspannung des Stators bürstenlos auf den Rotor übertragen zu können, wird auf dem Stator und dem Rotor jeweils eine weitere Wicklung angebracht. Mit Hilfe dieser zusätzlichen Wicklungen kann die Primärspannung der Statorwicklung nach dem Transformatorprinzip übertragen werden. Die beiden Wicklungen, die auf dem Rotor angebracht sind, sind elektrisch gekoppelt, so daß die Spannung, die vom Stator auf den Rotor übertragen wird, auch an der zweiten Wicklung des Rotors anliegt.
Je nach Lage des Rotors werden in den Statorwicklungen unterschiedlich große Spannungen induziert. An der Wicklung, die beim Winkel g = 0° vollständig durchflutet wird, liegt zu diesem Zeitpunkt die maximale Spannung an. Dreht sich der Rotor, so nimmt die Spannung U1 an dieser Wicklung ab, bis sie bei einem Winkel von 90° den Wert Null erreicht hat. Dann steigt die Spannung mit umgekehrtem Vorzeichen wieder an bis sie bei 180° wieder ihr Maximum erreicht hat. Die Spannung U1 hat als Hüllkurve eine Cosinusschwingung. Die Spannung U2, die gegenüber U1 um 90° verschoben ist, hat bei 0° den Wert 0 V. Sie steigt an bis sie bei 90° ihren Maximalwert erreicht hat und fällt dann wieder ab. Die Hüllkurve von U2 ist folglich eine Sinusschwingung.
Die Signale des Resolvers werden im R/D-Wandler (Resolver-Digital-Wandler) des Servoumrichters in einen digitalen Zählwert gewandelt. Dieser digitale Wert wird weiterverarbeitet, um weitere Informationen daraus zu erhalten. Zum einen liefert der R/D-Wandler die Information zur Rotorlage. Gleichzeitig kann mit Hilfe des Zählwertes die Drehzahl des Motors bestimmt werden, indem die Anzahl der Impulse innerhalb eines bestimmten Zeitfensters gezählt und daraus die Drehzahl ermittelt wird. Als drittes können die zwei niederwertigsten Bits des Zählerwertes ausgewertet werden:
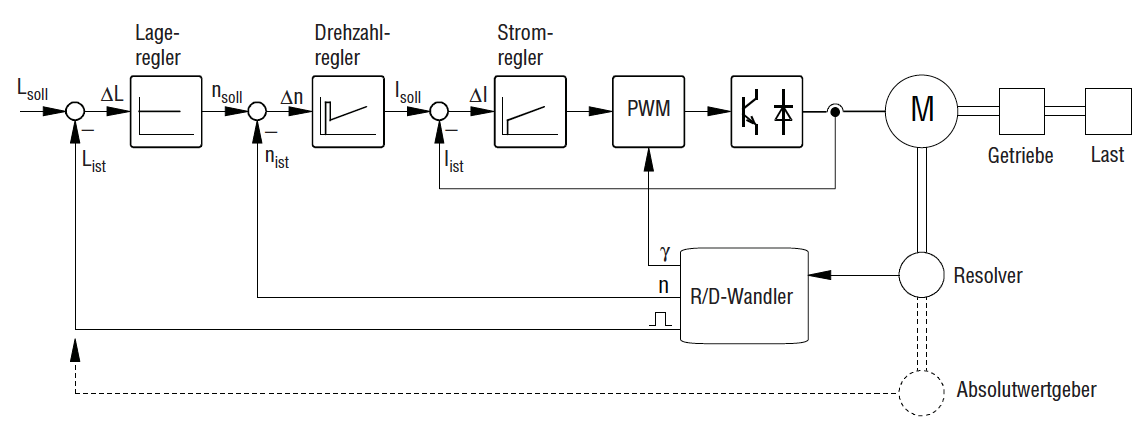
Führungsgröße des Servoreglers ist der externe Lage-Sollwert. Die Regeldifferenz aus dem Lage-Sollwert und dem Lage-Istwert ist die Eingangsgröße des Lagereglers. Dieser liefert am Ausgang die zugehörige Soll-Drehzahl nsoll des Motors. Soll- und Istwert der Drehzahl werden im untergeordneten Drehzahlregler verglichen. Die Regeldifferenzwird im Drehzahlregler proportional-integral verarbeitet. Das Ausgangssignal des Drehzahlreglers bildet den Stromsollwert und wird, um Motor und Wechselrichter zu schützen, einer Begrenzerschaltung zugeführt, deren Ausgangssignal wiederum den Sollwert für den Stromregler darstellt. Die Stromistwerte werden über eine Gleichrichterschaltung in ein Gleichstromsignal umgewandelt. Der Stromregler vergleicht Soll- und Istwert und bildet über den Pulsweitenmodulator (PWM) die Steuersignale, die auf die Ansteuerstufen der einzelnen Leistungstransistoren des Wechselrichters geführt werden. Bis auf die Stromregelung, die aufgrund der geforderten Schnelligkeit analog ausgeführt ist, werden alle anderen Regel-, Steuer- und Überwachungsaufgaben vom Microcontroller übernommen.
Der Stromregler ist als PI-Regler aufgebaut. Eingangsgröße
ist die
Abweichung zwischen Soll- und Iststrom einer Motorphase, Ausgangsgröße
die
Steuerspannung für den Pulsweitenmodulator. Dieser erzeugt mit Hilfe
des
Sinus-Dreieck-Vergleichs eine pulsweitenmodulierte Spannung, mit der
der
Wechselrichter angesteuert wird.
Der Stromistwert wird mit Hilfe eines Gleichstrommeßwandlers am Ausgang
des
Wechselrichters gemessen und auf den Vergleicher am Eingang des
Stromreglers
geführt.
Der Stromregler ist die innerste Regelschleife des Servoreglers und muß
daher
sehr schnell reagieren, da alle übergeordneten Regler in ihrer
Geschwindigkeit von diesem abhängig sind.
Damit die Drehzahlregelung den geforderten hohen Stellbereich aufweist, müssen auch kleinste Drehzahlen noch genau erfasst werden. Daher benötigt man einen hoch auflösenden Rotorpositionsgeber und einen möglichst kurzen Abtastzyklus. Dies wiederum erfordert eine hohe Verarbeitungsgeschwindigkeit und daher einen besonders leistungsfähigen Rechner. Der Drehzahlregler ist dem Stromregler überlagert. Er erhält die Vorgabe der Solldrehzahl über:
Der Lageregler wird als reiner Proportionalregler
ausgeführt. Ein
Integral-Anteil würde zu einem unzulässigen Überschwingen des Antriebs
beim
Einfahren in die Zielposition führen. Der Integral-Anteil des
untergeordneten
Drehzahlreglers sorgt dafür, daß eine bleibende Regelabweichung der
Lage
(z.B. bei Belastung) vermieden wird.
(Quelle: Praxis der Antriebstechnik, Band 7, Servo-Antriebe:
Grundlagen,
Eigenschaften, Projektierung, SEW Eurodrive 1997)